
型号:
更新时间:[2024-11-26]激光3D扫描仪盘库系统
一、系统简介:
激光3D扫描仪盘库系统是一种非接触式的高速激光地图技术,根据料场现场盘点需求开发的产品。它通过高速激光扫描测量的方法,大面积高分辨率地快速获取被测对象表面的三维坐标数据。该技术具有快速、非接触性、高精度、高密度、数字化等特性,非常适合用于大型物体体积的测量,如煤堆、粮库堆积物等。
该系统可以对库、棚、露天料场等散装物料进行料型分布成像扫描并进行三维显示,具有库存体积计量、物料质量计量、高速数据处理、远程操控等功能,实现了大型料场的自动盘库,即可完成对整个料场的实时扫描测量、料场相关数据的实时采集,系统将采集的测量数据实时自动上传,经过系统软件的建模、计算,完成料场的三维数字建模,同时生成煤堆的三维立体图形、体积等,结合料堆密度(业主给定),可实时获取存煤量等信息,从而科学计算出被测料场的体积形状和质量。激光3D扫描仪自动盘库系统可以完成原来在生产场所无法完成的很多过程测量工作。除了能看到的功能之外,该系统还有具有如下优点:安装和操作方便,免维护设计,可以节省大量成本,提高整体性能和盈利能力。库存量越大,该系统创造的价值越多。
该系统可以做到料场全覆盖,无盲区。

(1)激光测量原理
激光测量是通过激光扫描仪和距离传感器来获取被测目标的表面形态。激光扫描仪一般由激光发射器、接收器、时间计数器、微电脑等部分组成。激光脉冲发射器周期地驱动一激光二级管发射激光脉冲,然后由接收透镜接收目标表面后向反射信号,产生一接收信号,利用一稳定的石英时钟对发射与接收时间差作计数,经由微电脑对测量资料进行内部微处理,显示或存储、输出距离和角度资料,并与距离传感器获取的数据相匹配,最后经过相应系统软件进行一系列处理,获取目标表面三维坐标数据,从而进行各种量算或建立立体模型。
我公司生产的激光3D扫描仪自动盘库系统,可以对料棚的散状物料进行料型分布成像扫描并进行三维显示,具有库存体积计量、物料质量计量、高速数据处理、远程操控等功能,实现了大型料场的自动盘库。

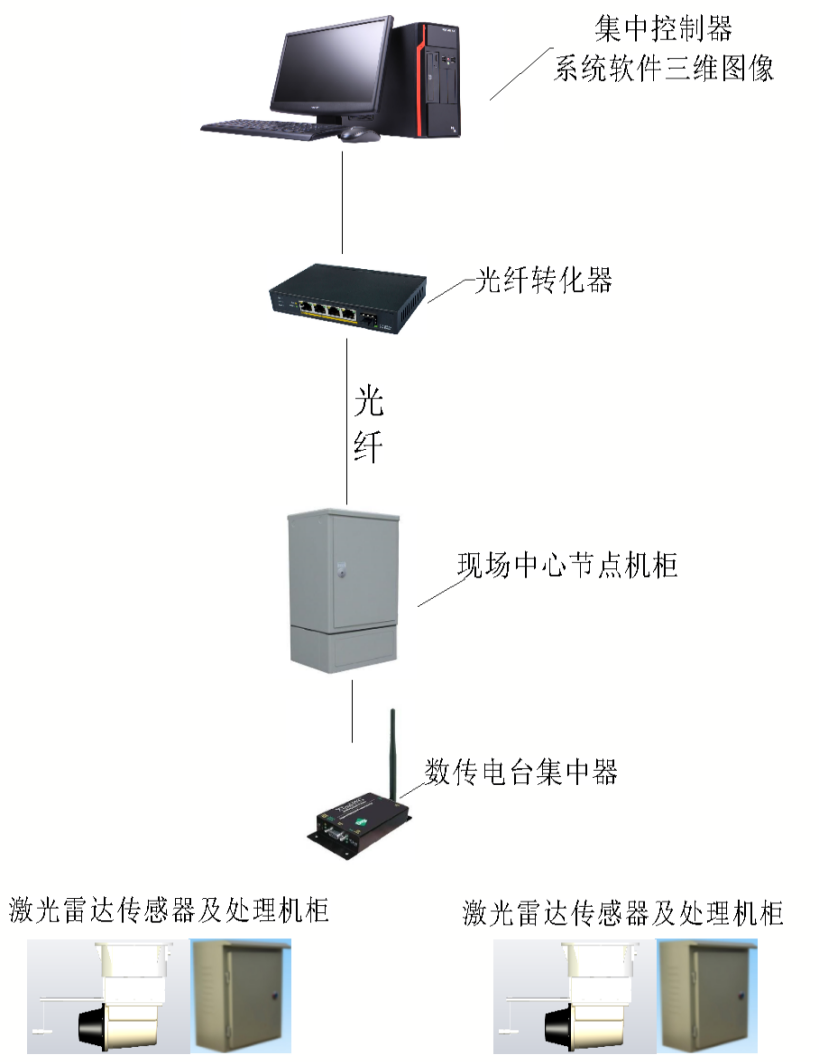
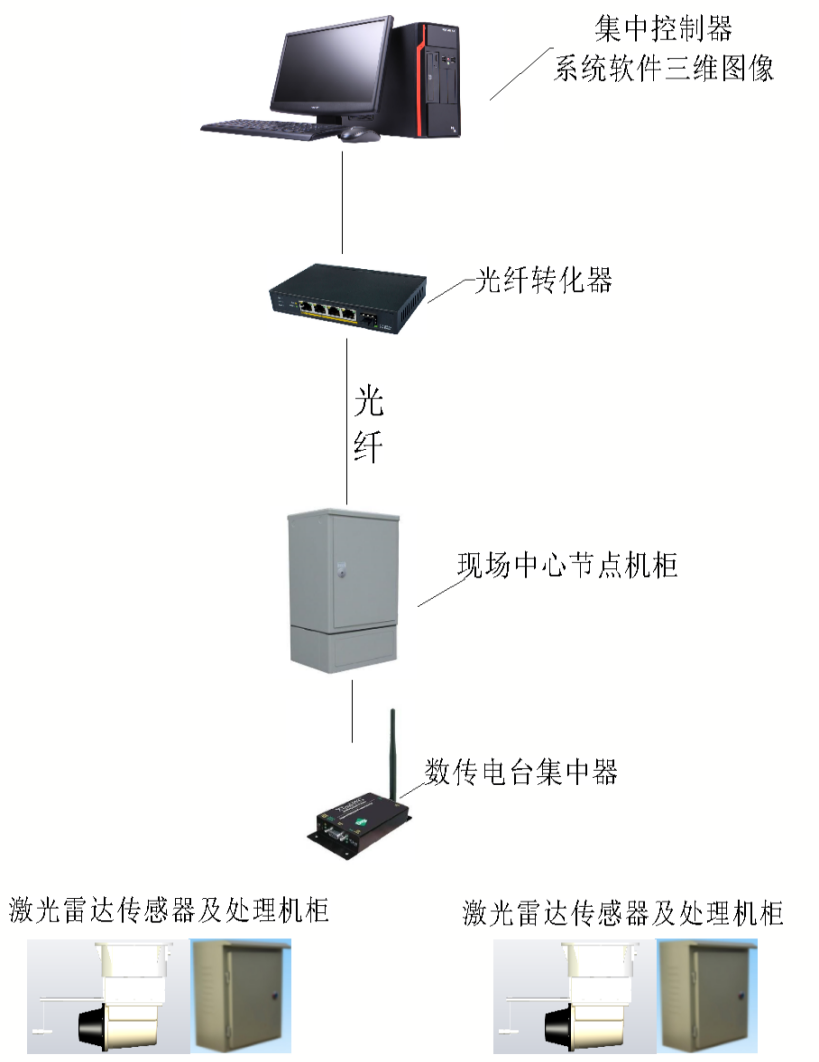
(2)主要组成结构如下:
① 硬件部分由固定式激光雷达3D扫描仪、配电箱、工控机等组成。
② 软件部分由料仓料位数据模块、三维成像模块、历史报表模块组成。
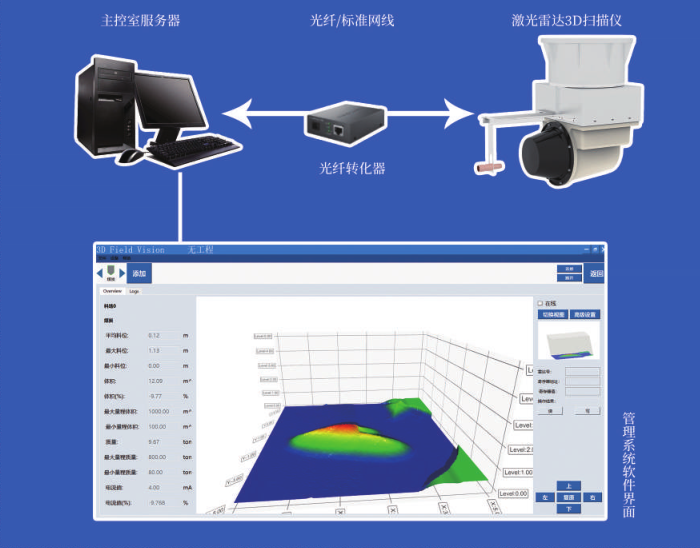
激光自动测量系统结构介绍图
二、方案概述
激光测距的原理,通过记录被测物体表面大量的密集的点的三维坐标、反射率和纹理等信息,可快速复建出被测目标的三维模型及线、面、体等各种图件数据。由于三维激光扫描系统可以密集地大量获取目标对象的数据点,因此相对于传统的单点测量,三维激光扫描技术也被称为从单点测量进化到面测量的革命性技术突破。
本系统基于无合作目标激光扫描测量技术和其它传感器的集成,能够快速、连续、主动地获取目标表面形体数据,并具备较高的测量精度。
三、技术特点
1.数据获取全自动化,一键式操作盘点,也可以定时盘点。
2.实现盘点测量的无盲区扫描。
3.最大测量速度可以达到100万点每秒,可在十分钟内完成这个料场的扫描和建模工作。
4.数据获取全要素,高密度、高精度,精度可达到毫米级别。
5.数据接口开放可以对接厂内其他系统。
6.可根据要求配置自动升降装置,检修方便、安全。
7.非接触式测量,保证作业安全。
系统网络示意图
四、激光扫描三维建模算法简介
三维激光扫描技术利用激光测距的原理,通过记录被测物体表面大量的密集的点的三维坐标、反射率和纹理等信息,可快速复建出被测目标的三维模型及线、面、体等各种图件数据,越密集的点云创建的模型越精确(这个过程称做三维重建)。
(1)三维激光扫描数据处理
在三维激光扫描的过程中,点云数据的获取常常会受到物体遮挡、光照不均匀等因素的影响,容易造成复杂形状物体的区域扫描盲点,形成孔洞。同时由于扫描测量范围有限,对于大尺寸物体或者大范围场景,不能一次性进行完整测量,必须多次扫描测量,因此扫描结果往往是多块具有不同坐标系统且存在噪声的点云数据,不能够满足人们对数字化模型真实度和实时性的要求,所以需要对三维点云数据进行去噪、简化、配准以及补洞等预处理。
通过数据预处理,可以有效剔除点云中的噪声和外点,在保持几何特征的基础上实现点云数据简化,并将不同角度扫描的点云统一到同一坐标系下,为后续的曲面构建及三维实体模型生成提供稳健的数据基础。
(2)点云数据的三维建模
点云建模需要利用三维实景建模软件,LIDAR3DSCANNERSOFTWARE.C3三维建模软件可以更好地评估点云并生成更精确的三维模型。
LIDAR3DSCANNERSOFTWARE.C3可以对点云进行增强、分割、分类,并与工程模型相结合。利用LIDAR3DSCANNERSOFTWARE.C3的高级三维建模、横截面切割、断裂线和地形提取功能,能快速高效地对竣工条件进行建模并支持设计流程。
基于点云数据,LIDAR3DSCANNERSOFTWARE.C3还可以从生成非常庞大的可缩放地形模型。通过与原始数据源同步,可缩放地形模型可实时更新。这样做的价值在于,拥有所有数据的全局、最新和综合表示,并用于使用各种显示模式和执行分析,以及生成动画和可视化效果。
- 上一篇: TX-3挡煤墙温度数据采集箱
- 下一篇: 专用型光纤测温主机
